创建智能飞行预设航点功能App
如果您在本教程中遇到任何错误或者bug,请使用Github issue,在DJI论坛发帖或者在Gitbook中评论告知我们。您可以随时给我们发送Github pull request来帮助我们修复错误。关于文档的修改需要符合格式标准
在本教程中, 你将学到如何安装使用 DJI PC 模拟器, 如何升级你的 Inspire 1, Phantom 3 Professional 和 Phantom 3 Advanced的固件到Beta版本, 以及如何使用DJI PC 模拟器去测试地面站的API. 同时, 你将学到地面站预设航点功能的基本使用流程. 现在开始学习吧!
你可以在这里下载到本教程的全部代码: https://github.com/DJI-Mobile-SDK/iOS-GSDemo.git
使用DJI PC模拟器
1. 介绍
DJI PC 模拟器专为 SDK 开发者所设计。模拟器通过 UDP 广播的方式传输飞行器模拟的参数, 在 PC 端实现飞行器的 3D 虚拟显示,并且可以进行数据分析。
适用操作系统: Windows 7, Windows 8, 和 Windows 8.1
适用飞行器型号: Matrice 100, Inspire 1, Phantom 3 Professional 和 Phantom 3 Advanced
2. 安装DJI PC模拟器
首先, 请从这里下载DJI PC模拟器和DJI WIN 驱动程序: https://developer.dji.com/mobile-sdk/downloads :
- DJI PC模拟器及用户手册V1.0
- WIN Driver Installer
你必须在使用模拟器前安装好驱动程序. 因为目前模拟器只支持Windows系统, 你必须找到一台 PC 或者有运行着Windows系统虚拟机(像 VMWare 或者 Parallels Desktop)的Mac才能使用模拟器. 现在, 双击 DJI_WIN_Driver_Installer.exe 文件进行安装. 如果弹出一个写着“请给主控供电并用USB连接电脑”的对话框, 点击是, 然后按照指引安装好即可。
接着, 双击 DJISimulator-Installer.exe 文件并按指引安装好模拟器即可。
3. 使用DJI PC模拟器
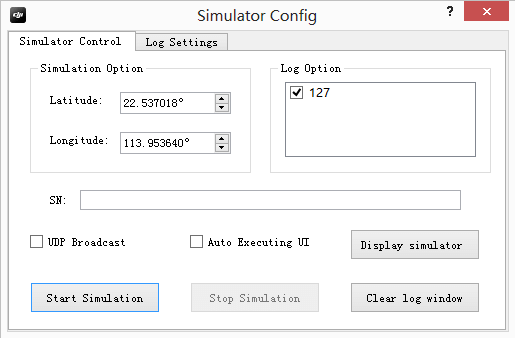
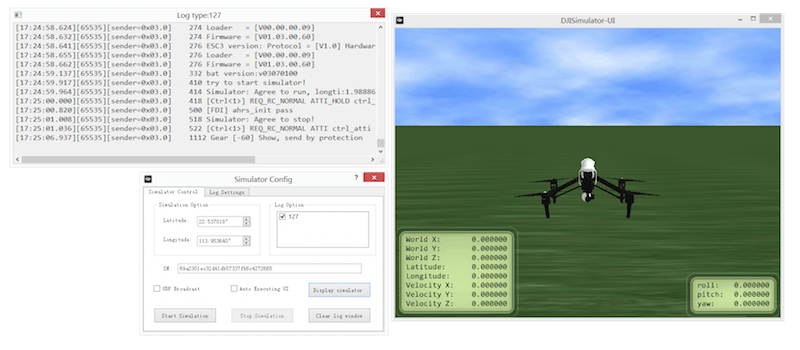
1. 运行DJI PC模拟器时,会首先弹出Simulator Config对话框. 设置好 Latitude(纬度) 和 Longitude(经度) 的值. SN 代表连接到PC模拟器上的飞机序列号. 如果 SN 的值为空, 请检查你的飞机是否和PC连接好,或者你的飞机的固件版本是否属于开发版本.
Note:
如果你的飞机的经纬度靠近禁飞区, 它将无法起飞。
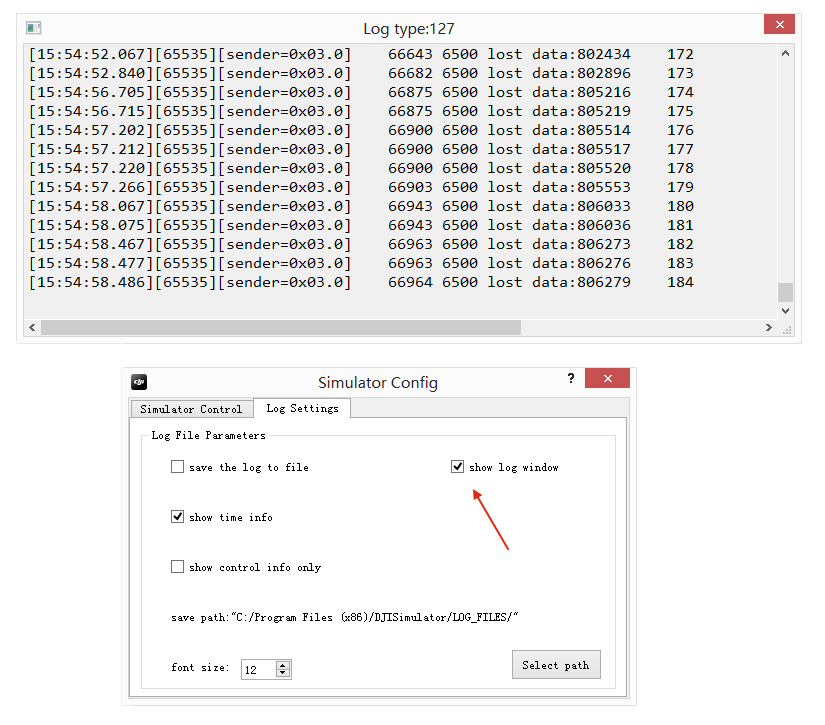
在Log Settings选项中勾选show log window, 可以弹出log调试界面:
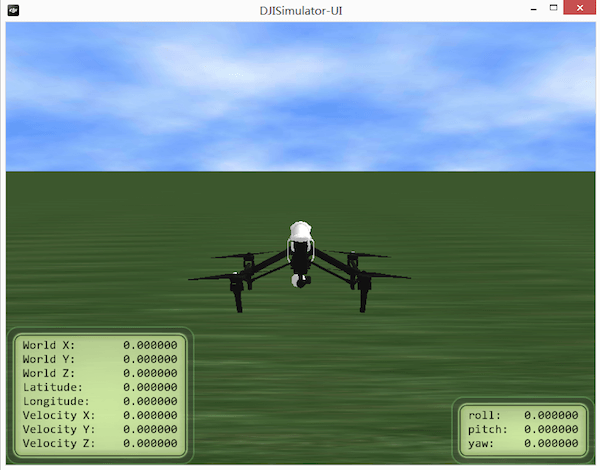
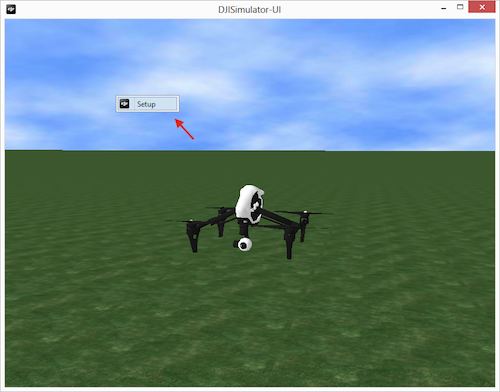
2. 通过Micro-USB线将你的飞机连接到PC上, 启动遥控器然后启动飞机。 点击Display Simulator, 会出现以下界面(它会显示你正在使用的飞机). 当前使用的是Inspire 1:
注意:
使用模拟器时不需要连接 DJI Pilot App.
使用模拟器时不需要安装螺旋桨至飞行器.
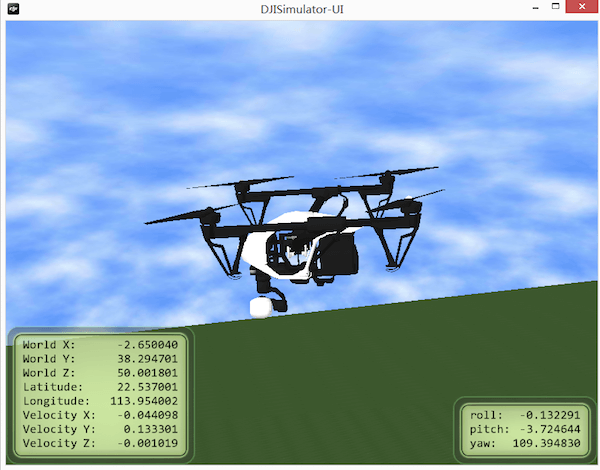
3. 点击 Start Simulation 开始模拟飞行。用户可以使用遥控器(档位拨到F档)和 SDK API 串口来控制飞行器的起飞、降落、飞行方向和返航。飞行状态栏 World X,Y,Z 分别表示北-南,东-西 和上-下方向。其中,北、东和上的数值为正值,南、西和下的数值为负值。
4. 单击和拖曳鼠标可以调整观测飞行器的角度。滚动鼠标可以放大或缩小飞行视图。
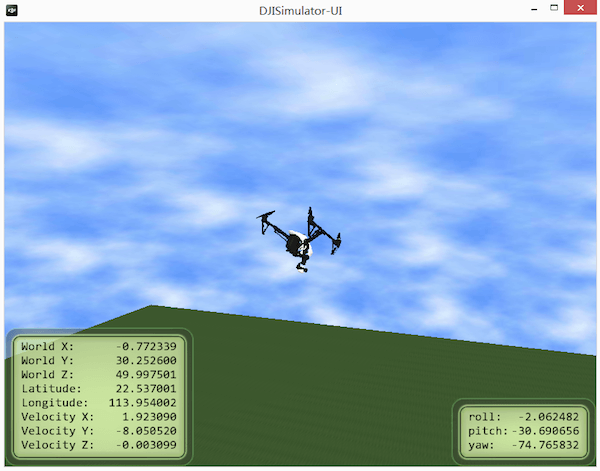
注意: 你还可以在模拟器上看到飞机的飞行轨迹线。右键点击模拟器对话框,选中setup,如下所示:
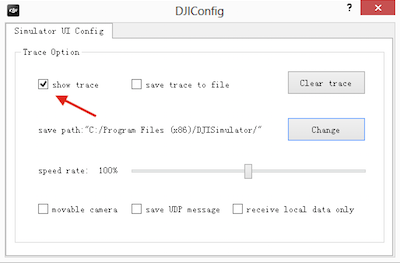
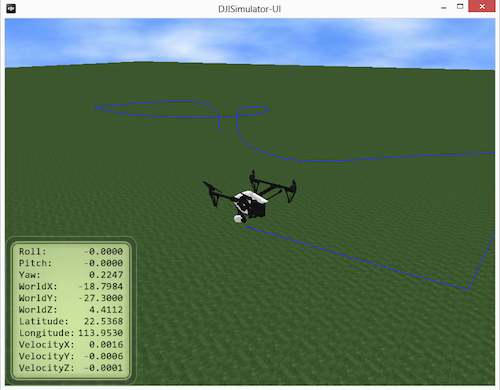
然后勾选simulator UI Config选项卡下面的show trace,以显示飞行轨迹,如下所示:
以下是效果图:
5. 点击 Stop Simulation 结束模拟飞行。使用完毕后关闭飞行器、遥控器和模拟器。
重要: 如果你想中途停止地面站任务, 你必须点击 Stop Simulation 来停止飞行任务, 否则在你下次启动地面站任务时,模拟器可能会继续执行上次的地面站任务。
要了解更多关于 DJI PC模拟器的内容, 请阅读 DJI PC 模拟器用户手册.pdf 文件, 你可以从下载的DJI PC模拟器包里面找到该文件。
升级飞机固件
确保你的飞机固件支持DJI Mobile SDK的开发,对于接下来的教程操作很重要. 请从这里下载beta版本的飞机固件: https://developer.dji.com/mobile-sdk/downloads :
- Phantom 3 Professional 固件升级包
- Phantom 3 Advance 固件升级包
- Inspire1 固件升级包
一般不必升级遥控器的固件, 只需把下载好的 bin 文件放到SD卡中, 把SD卡插到飞机的相机上面, 然后重启飞机升级即可. 升级过程可能会花10 ~ 30分钟的时间.
对于Inspire 1, 你可以通过检查飞机发出的声音来判断升级状态:
- 升级中: 嘀-嘀-嘀-嘀 ...(短促的)
- 升级成功: 嘀---嘀嘀 ...
- 升级失败或者出错: 嘀 ---- (长鸣提示音)
对于Phantom 3系列, 你可以检查云台上面的指示灯来判断升级状态:
- 升级中: 绿红交替闪烁
- 升级成功: 定制闪烁
- 升级失败或者出错: 红灯常亮
根据你目前使用的飞机, 你可以通过检查升级过程生成的 txt 文件来获取固件升级结果。 对于Phantom 3 Professional, txt文件的名字为 "P3X_FW_RESULT_AB.txt". 对于Inspire 1, txt文件的名字为 "WM610_FW_RESULT_AB.txt". 以下是 txt 文件内容例子:
创建Map View
1. 导入Framework 和 库文件
你已经完成了以上步骤, 可以开始开发应用程序了. 在之前的教程创建航拍相机App, 你学会了如何导入DJI Mobile SDK到你的Xcode工程中,并进行激活操作。如果你还没有阅读, 请先看下再进行以下操作。
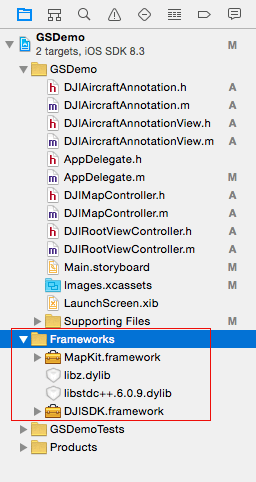
1. 在Xcode中创建一个工程并命名为 "GSDemo", 复制 DJISDK.framework 到你的 Xcode 工程文件夹中. 然后, 选择工程,并进入 Build Phases -> Link Binary With Libraries. 点击底部的 "+" 按钮添加以下两个库文件到工程中: libstdc++.6.0.9.dylib 和 libz.dylib. 以下是截图:
2. 创建Map View
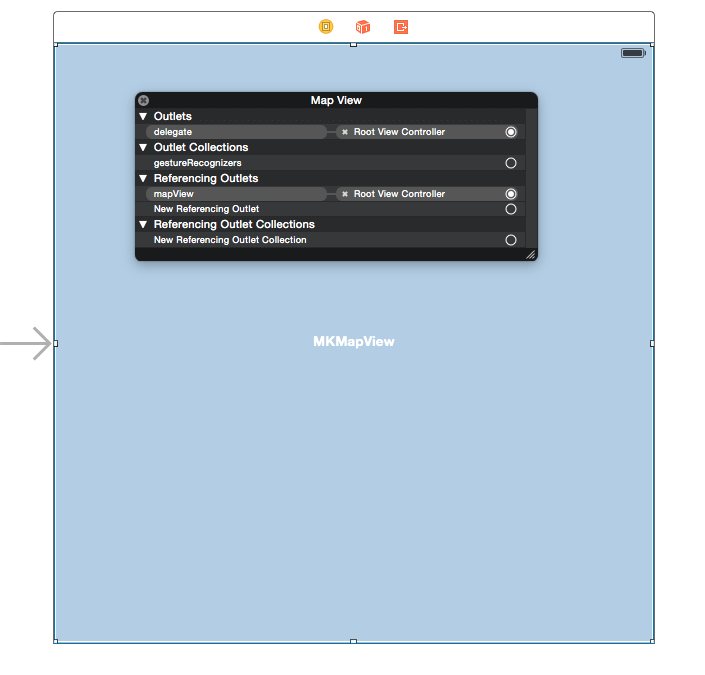
接着, 我们删除 ViewController.h 和 ViewController.m 文件, 他们在你创建Xcode工程时,自动帮你生成了. 然后, 创建一个名字为"DJIRootViewController"的viewController,并在Main.storyboard中将它设置为 Root View Controller. 接着, 从Object Library中拖一个 MKMapView 到 DJIRootViewController中, 设置它的AutoLayout constraints, 以及它的delegate到DJIRootViewController, 如下图所示:
紧接着, 打开DJIRootViewController.h文件, 为MKMapView创建一个IBOutlet, 命名为 "mapView", 然后把它连接到Main.storyboard的“MKMapView”. 导入以下头文件并实现MKMapView的delegate方法:
#import <DJISDK/DJISDK.h>
#import <MapKit/MapKit.h>
@interface DJIRootViewController : UIViewController<MKMapViewDelegate>
@property (weak, nonatomic) IBOutlet MKMapView *mapView;
@end
现在, 编译运行下工程. 如果一切正常, 你会看到以下截屏画面:
3. 添加Annotations到MapView中
目前的map view比较简单. 我们给它加点有趣的东西吧. 新建一个NSObject文件并命名为"DJIMapController", 它会被用来处理地图上的MKAnnotations(对于本教程来说,是预设航点设置)逻辑. 打开 DJIMapController.h 文件,然后添加以下代码:
#import <UIKit/UIKit.h>
#import <MapKit/MapKit.h>
@interface DJIMapController : NSObject
@property (strong, nonatomic) NSMutableArray *editPoints;
/**
* Add Waypoints in Map View
*/
- (void)addPoint:(CGPoint)point withMapView:(MKMapView *)mapView;
/**
* Clean All Waypoints in Map View
*/
- (void)cleanAllPointsWithMapView:(MKMapView *)mapView;
/**
* Current Edit Points
*
* @return Return an NSArray contains multiple CCLocation objects
*/
- (NSArray *)wayPoints;
@end
这里, 我们创建了一个叫做"editPoints"的NSMutableArray来存放waypoint对象。并且添加了两个方法,用于添加和删除waypoint. 最后的方法是用来返回添加到当前地图上的waypoint对象.
来到DJIMapController.m文件,并用以下代码替换掉原来的内容:
#import "DJIMapController.h"
@implementation DJIMapController
- (instancetype)init
{
if (self = [super init]) {
self.editPoints = [[NSMutableArray alloc] init];
}
return self;
}
- (void)addPoint:(CGPoint)point withMapView:(MKMapView *)mapView
{
CLLocationCoordinate2D coordinate = [mapView convertPoint:point toCoordinateFromView:mapView];
CLLocation *location = [[CLLocation alloc] initWithLatitude:coordinate.latitude longitude:coordinate.longitude];
[_editPoints addObject:location];
MKPointAnnotation* annotation = [[MKPointAnnotation alloc] init];
annotation.coordinate = location.coordinate;
[mapView addAnnotation:annotation];
}
- (void)cleanAllPointsWithMapView:(MKMapView *)mapView
{
[_editPoints removeAllObjects];
NSArray* annos = [NSArray arrayWithArray:mapView.annotations];
for (int i = 0; i < annos.count; i++) {
id<MKAnnotation> ann = [annos objectAtIndex:i];
[mapView removeAnnotation:ann];
}
}
- (NSArray *)wayPoints
{
return self.editPoints;
}
@end
首先, 我们在init方法中初始化editPoints数组对象, 然后从CGPoint创建 MKPointAnnotation 对象并把它添加到我们的 mapView上, 最后实现 cleanAllPointsWithMapView 方法来清空eidtPoints数组,以及mapview上的annotations对象.
回到DJIRootViewController.h文件, 导入DJIMapController.h头文件, 然后创建一个叫“mapController”的DJIMapController 属性. 因为我们希望通过点击地图来添加航点标注钉, 我们还需要创建一个叫"tapGesture"的 UITapGestureRecognizer 属性. 最后, 添加一个 UIButton 到 Main.storyboard 的 DJIRootViewController 视图中, 设置它的IBOutlet名字为 "editBtn", 然后为它添加一个名为"editBtnAction"的IBAction方法, 如下所示:
@property (nonatomic, strong) DJIMapController *mapController;
@property (nonatomic, strong) UITapGestureRecognizer *tapGesture;
@property (weak, nonatomic) IBOutlet UIButton *editBtn;
- (IBAction)editBtnAction:(id)sender;
完成以上步骤后, 打开DJIMapController.m文件, 初始化mapController 和 tapGesture 变量, 然后添加 tapGesture 到 mapView 上用于航点添加手势. 进一步的, 我们需要一个命名为"isEditingPoints"的布尔值去存储编辑 waypoint 的状态, 它也会用来判断修改editBtn的标题. 最后, 实现 tapGesture的action方法 addWayPoints, 如下图所示:
#import "DJIRootViewController.h"
@interface DJIRootViewController ()
@property (nonatomic, assign)BOOL isEditingPoints;
@end
@implementation DJIRootViewController
- (void)viewDidLoad {
[super viewDidLoad];
self.mapController = [[DJIMapController alloc] init];
self.tapGesture = [[UITapGestureRecognizer alloc] initWithTarget:self action:@selector(addWaypoints:)];
[self.mapView addGestureRecognizer:self.tapGesture];
[[NSNotificationCenter defaultCenter] addObserver:self selector:@selector(registerAppSuccess:) name:@"RegisterAppSuccess" object:nil];
}
#pragma mark Custom Methods
- (void)registerAppSuccess:(NSNotification *)notification
{
}
- (void)addWaypoints:(UITapGestureRecognizer *)tapGesture
{
CGPoint point = [tapGesture locationInView:self.mapView];
if(tapGesture.state == UIGestureRecognizerStateEnded){
if (self.isEditingPoints) {
[self.mapController addPoint:point withMapView:self.mapView];
}
}
}
- (IBAction)editBtnAction:(id)sender {
if (self.isEditingPoints) {
[self.mapController cleanAllPointsWithMapView:self.mapView];
[self.editBtn setTitle:@"Edit" forState:UIControlStateNormal];
}else
{
[self.editBtn setTitle:@"Reset" forState:UIControlStateNormal];
}
self.isEditingPoints = !self.isEditingPoints;
}
#pragma mark MKMapViewDelegate Method
- (MKAnnotationView *)mapView:(MKMapView *)mapView viewForAnnotation:(id <MKAnnotation>)annotation
{
if ([annotation isKindOfClass:[MKPointAnnotation class]]) {
MKPinAnnotationView* pinView = [[MKPinAnnotationView alloc] initWithAnnotation:annotation reuseIdentifier:@"Pin_Annotation"];
pinView.pinColor = MKPinAnnotationColorPurple;
return pinView;
}
return nil;
}
在以上代码中, 我们添加了一个NSNotification通知监听器去检查DJI Mobile SDK的注册状态, 确保app注册成功. 同时, 我们通过调用DJIMapController 的
- (void)addPoint:(CGPoint)point withMapView:(MKMapView *)mapView
方法来实现addWaypoints gesture action 以添加 waypoints 到map上. 接着, 我们实现了IBAction方法editBtn, 更新按钮的标题,并且根据isEditingPoints的布尔值去清空waypoints. 最后, 我们实现 MKMapViewDelegate的方法来修改pin(航点钉)的颜色为紫色.
完成以上步骤后, 编译运行工程,尝试通过点击屏幕添加航点到地图上. 如果一切顺利, 你会看到以下动画:
4. 定位MKMapView到特定位置
你也许发现了地图的位置和你当前的坐标位置不一致,而且很难找到你在地图上的当前位置。如果有一个功能,能让我们迅速定位到你在地图上的当前位置,app会人性化很多。 要实现该功能,我们需要使用CLLocationManager.
打开DJIRootViewController.h文件并且导入CoreLocation的头文件. 创建一个命名为"locationManager"的 CLLocationManager 属性. 然后创建一个命名为"userLocation"的CLLocationCoordinate2D的属性来存储用户当前的坐标位置信息. 接着, 在类里面实现CLLocationManager的 CLLocationManagerDelegate协议, 如下图所示:
#import <DJISDK/DJISDK.h>
#import <MapKit/MapKit.h>
#import <CoreLocation/CoreLocation.h>
@interface DJIRootViewController : UIViewController<MKMapViewDelegate, CLLocationManagerDelegate>
@property (nonatomic, weak) IBOutlet MKMapView *mapView;
@property (nonatomic, strong) CLLocationManager* locationManager;
@property (nonatomic, assign) CLLocationCoordinate2D userLocation;
@property (nonatomic, strong) UITapGestureRecognizer *tapGesture;
@property (nonatomic, weak) IBOutlet UIButton *editBtn;
- (IBAction)editBtnAction:(id)sender;
- (IBAction)focusMapAction:(id)sender;
@end
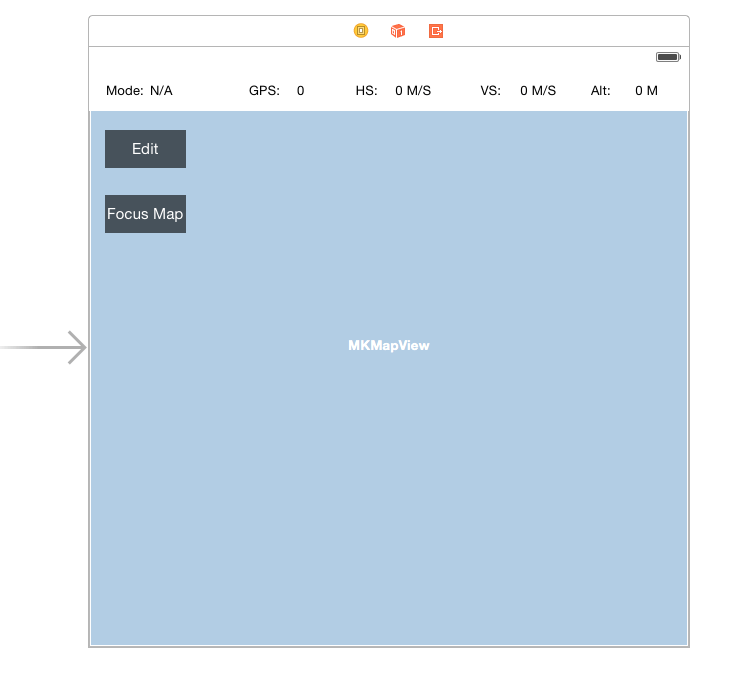
这里我们在Main.storyboard的DJIRootViewController中添加了一个命名为"Focus Map"的UIButton, 并且添加了一个叫"focusMapAction"的IBAction方法. 以下是Main.storyboard的截图:
完成以上步骤后, 打开DJIRootViewController.m文件并添加以下代码:
- (void)viewWillAppear:(BOOL)animated
{
[super viewWillAppear:animated];
[self startUpdateLocation];
}
- (void)viewWillDisappear:(BOOL)animated
{
[super viewWillDisappear:animated];
[self.locationManager stopUpdatingLocation];
}
- (void)viewDidLoad {
[super viewDidLoad];
self.userLocation = kCLLocationCoordinate2DInvalid;
self.mapController = [[DJIMapController alloc] init];
self.tapGesture = [[UITapGestureRecognizer alloc] initWithTarget:self action:@selector(addWaypoints:)];
[self.mapView addGestureRecognizer:self.tapGesture];
[[NSNotificationCenter defaultCenter] addObserver:self selector:@selector(registerAppSuccess:) name:@"RegisterAppSuccess" object:nil];
}
- (BOOL)prefersStatusBarHidden {
return NO;
}
#pragma mark CLLocation Methods
-(void) startUpdateLocation
{
if ([CLLocationManager locationServicesEnabled]) {
if (self.locationManager == nil) {
self.locationManager = [[CLLocationManager alloc] init];
self.locationManager.delegate = self;
self.locationManager.desiredAccuracy = kCLLocationAccuracyBest;
self.locationManager.distanceFilter = 0.1;
if ([self.locationManager respondsToSelector:@selector(requestAlwaysAuthorization)]) {
[self.locationManager requestAlwaysAuthorization];
}
[self.locationManager startUpdatingLocation];
}
}else
{
UIAlertView *alert = [[UIAlertView alloc] initWithTitle:@"Location Service is not available" message:@"" delegate:self cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alert show];
}
}
- (IBAction)focusMapAction:(id)sender {
{
if (CLLocationCoordinate2DIsValid(self.userLocation)) {
MKCoordinateRegion region = {0};
region.center = self.userLocation;
region.span.latitudeDelta = 0.001;
region.span.longitudeDelta = 0.001;
[self.mapView setRegion:region animated:YES];
}
}
#pragma mark - CLLocationManagerDelegate
- (void)locationManager:(CLLocationManager *)manager didUpdateLocations:(NSArray *)locations
{
CLLocation* location = [locations lastObject];
self.userLocation = location.coordinate;
}
首先, 我们在viewDidLoad方法中初始化 userLocation 的值为 kCLLocationCoordinate2DInvalid. 然后我们添加了一个新的方法 startUpdateLocation 来初始化 locationManger, 设置好它的参数值并且开始更新位置信息. 如果app的定位服务不可用, 我们可以添加一个UIAlertView来展示警告信息. 在viewWillAppear方法中调用startUpdateLocation,然后在 viewWillDisappear方法中停止它. 进一步的, 我们需要实现 CLLocationManagerDelegate 方法来更新 userLocation 属性. 最后, 我们实现 focusMapAction 方法来定位地图到用户当前的坐标位置.
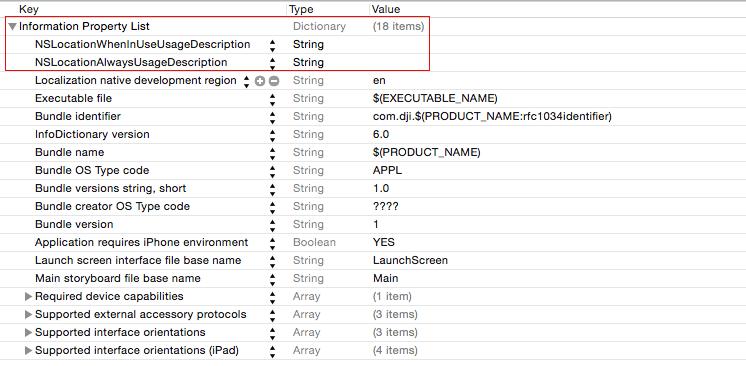
在iOS8中, 我们必须首先调用 locationManager的 requestAlwaysAuthorization 方法, 我们在startUpdateLocation 方法中实现了该调用. 接着, 在工程的Info.plist中添加 NSLocationAlwaysUsageDescription 或者 NSLocationWhenInUseUsageDescription key, 你可以对这两个key设置具体的值。当出现提示信息,询问你是否允许应用程序使用你当前的地理位置信息时,你对这两个key设置的值也会出现。这里我们设置两个key的值为空:
编译运行工程,检查下地图定位的功能. 当你第一次启动app时, app会弹出一个对话框,询问是否允许访问你的地理位置信息. 选择允许 然后点击 Focus Map 按钮. 如果效果和以下动画一样,地图自动定位到你当前的位置, 恭喜, 你已经完成了Focus Map功能!
5. 在地图上显示飞机
现在, 我们可以定位地图到我们当前的位置, 这是一个好的开端! 让我们来做一些更有趣的事情吧. 我们将用DJI PC 模拟器来模拟飞机的GPS位置并将其显示在地图上.
你可能已经知道如何设置DJI PC 模拟器以及它的基本使用方法. 如果你想要将飞机位置设置为你当前的GPS位置,你可以在Simulator Config里将经纬度改成你当前的经纬度. 在接下来的例子中,我们将使用模拟器的初始数值.
我们回到代码. 创建一个MKAnnotationView的新子类名为"DJIAircraftAnnotationView"和一个NSObject的新子类名为DJIAircraftAnnotation. 下面是代码:
- DJIAircraftAnnotationView.h
#import <MapKit/MapKit.h>
@interface DJIAircraftAnnotationView : MKAnnotationView
-(void) updateHeading:(float)heading;
@end
- DJIAircraftAnnotationView.m
#import "DJIAircraftAnnotationView.h"
@implementation DJIAircraftAnnotationView
- (instancetype)initWithAnnotation:(id <MKAnnotation>)annotation reuseIdentifier:(NSString *)reuseIdentifier
{
self = [super initWithAnnotation:annotation reuseIdentifier:reuseIdentifier];
if (self) {
self.enabled = NO;
self.draggable = NO;
self.image = [UIImage imageNamed:@"aircraft.png"];
}
return self;
}
-(void) updateHeading:(float)heading
{
self.transform = CGAffineTransformIdentity;
self.transform = CGAffineTransformMakeRotation(heading);
}
@end
在上面的代码中,我们为飞机创造了一个MKAnnotationView, 加入了一个名为updateHeading的方法来改变飞机的头部方向, 并在init方法里设置它的图片为 "aircraft.png"(你可以在此教程的demo里获取图片) . 同时我们禁用了DJIAircraftAnnotationView'的draggable属性. 看看下面的代码:
- DJIAircraftAnnotation.h
#import <MapKit/MapKit.h>
#import "DJIAircraftAnnotationView.h"
@interface DJIAircraftAnnotation : NSObject<MKAnnotation>
@property(nonatomic, readonly) CLLocationCoordinate2D coordinate;
@property(nonatomic, weak) DJIAircraftAnnotationView* annotationView;
-(id) initWithCoordiante:(CLLocationCoordinate2D)coordinate;
-(void)setCoordinate:(CLLocationCoordinate2D)newCoordinate;
-(void) updateHeading:(float)heading;
@end
- DJIAircraftAnnotation.m
#import "DJIAircraftAnnotation.h"
@implementation DJIAircraftAnnotation
-(id) initWithCoordiante:(CLLocationCoordinate2D)coordinate
{
self = [super init];
if (self) {
_coordinate = coordinate;
}
return self;
}
- (void)setCoordinate:(CLLocationCoordinate2D)newCoordinate
{
_coordinate = newCoordinate;
}
-(void)updateHeading:(float)heading
{
if (self.annotationView) {
[self.annotationView updateHeading:heading];
}
}
@end
DJIAircraftAnnotation 类实现了 MKAnnotation 协议. 它被用来储存并更新CLLocationCoordinate2D属性. 同时,我们用updateHeading 来改变DJIAircraftAnnotationView的方向.
当你完成以上操作后,打开 DJIMapController.h 文件并导入 DJIAircraftAnnotation.h 文件:
#import "DJIAircraftAnnotation.h"
然后创建一个DJIAircraftAnnotation的属性,命名为aircraftAnnotation.
@property (nonatomic, strong) DJIAircraftAnnotation* aircraftAnnotation;
进一步的, 添加以下两个新方法来更新飞机在地图上的位置和头部转向:
/**
* Update Aircraft's location in Map View
*/
-(void)updateAircraftLocation:(CLLocationCoordinate2D)location withMapView:(MKMapView *)mapView;
/**
* Update Aircraft's heading in Map View
*/
-(void)updateAircraftHeading:(float)heading;
接下来,回到 DJIMapController.m 文件并实现我们刚加入的两个方法:
-(void)updateAircraftLocation:(CLLocationCoordinate2D)location withMapView:(MKMapView *)mapView
{
if (self.aircraftAnnotation == nil) {
self.aircraftAnnotation = [[DJIAircraftAnnotation alloc] initWithCoordiante:location];
[mapView addAnnotation:self.aircraftAnnotation];
}
[self.aircraftAnnotation setCoordinate:location];
}
-(void)updateAircraftHeading:(float)heading
{
if (self.aircraftAnnotation) {
[self.aircraftAnnotation updateHeading:heading];
}
}
这里,因为我们不希望DJIMapController.m文件里的cleanAllPointsWithMapView 方法将aircraftAnnotation(它代表在地图上面的飞机)删除掉,我们需要修改它,如下所示:
- (void)cleanAllPointsWithMapView:(MKMapView *)mapView
{
[_editPoints removeAllObjects];
NSArray* annos = [NSArray arrayWithArray:mapView.annotations];
for (int i = 0; i < annos.count; i++) {
id<MKAnnotation> ann = [annos objectAtIndex:i];
if (![ann isEqual:self.aircraftAnnotation]) {
[mapView removeAnnotation:ann];
}
}
}
我们加入一个if语句来检查地图的annotation是否等于aircraftAnnotation 属性, 如果不等于,我们移除它. 这样做,可以防止飞机的annotation被移除.
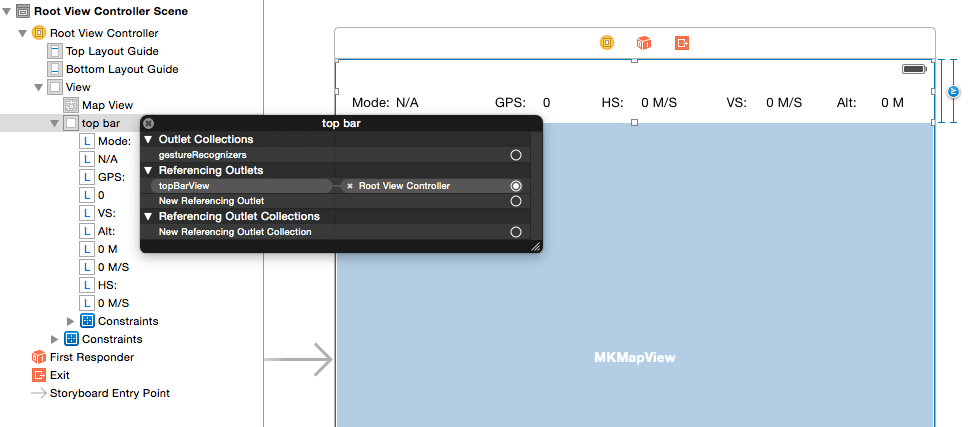
为了提供一个更好的用户体验,我们需要在地图的上方加入一个信息栏来显示飞机当前的状态:当前的GPS卫星数,垂直飞行速度,水平飞行速度以及飞机的高度. 让我们在Main.storyboard*的 RootViewController Scene画面里加入UI,如下所示:
当以上任务完成时。打开 DJIRootViewController.h 文件, 为以上UI元素创建IBOutlets, 导入DJISDK的头文件并且实现 DJIDroneDelegate , DJIMainControllerDelegate, DJIAppManagerDelegate 和 DJINavigationDelegate 协议. 我们在demo里使用的是Inspire 1,所以我们需要创建三个属性,一个是 DJIDrone的属性,一个是DJIInspireMainController的属性,另外一个是 NSObject
#import <DJISDK/DJISDK.h>
@interface DJIRootViewController : UIViewController<MKMapViewDelegate, CLLocationManagerDelegate, DJIDroneDelegate, DJIMainControllerDelegate, DJIAppManagerDelegate>
@property(nonatomic, strong) IBOutlet UILabel* modeLabel;
@property(nonatomic, strong) IBOutlet UILabel* gpsLabel;
@property(nonatomic, strong) IBOutlet UILabel* hsLabel;
@property(nonatomic, strong) IBOutlet UILabel* vsLabel;
@property(nonatomic, strong) IBOutlet UILabel* altitudeLabel;
@property(nonatomic, strong) DJIDrone* inspireDrone;
@property(nonatomic, strong) DJIInspireMainController* inspireMainController;
@property(nonatomic, weak) NSObject<DJINavigation>* navigationManager;
@property(nonatomic, assign) CLLocationCoordinate2D droneLocation;
现在,我们来到 DJIRootViewController.m 文件并在initUI方法里初始化UI元素的值. 同时加入一个 initDrone 新方法来初始化 inspireDrone属性. 在viewDidLoad 方法里运行 initUI 以及 initDrone 方法. 最后,创建一个新方法"registerApp", 并且在initDrone方法中调用它来注册app,如下所示:
-(void) initUI
{
self.modeLabel.text = @"N/A";
self.gpsLabel.text = @"0";
self.vsLabel.text = @"0.0 M/S";
self.hsLabel.text = @"0.0 M/S";
self.altitudeLabel.text = @"0 M";
}
- (void)initDrone
{
self.inspireDrone = [[DJIDrone alloc] initWithType:DJIDrone_Inspire];
self.inspireDrone.delegate = self;
self.navigationManager = self.inspireDrone.mainController.navigationManager;
self.navigationManager.delegate = self;
self.inspireMainController = (DJIInspireMainController*)self.inspireDrone.mainController;
self.inspireMainController.mcDelegate = self;
[self registerApp];
}
- (void)registerApp
{
NSString *appKey = @"Enter Your App Key Here";
[DJIAppManager registerApp:appKey withDelegate:self];
}
在 initDrone 方法中, 我们初始化了inspireDrone 和 navigationManager属性,然后设置它们的delegate为self. 接着,初始化inspireMainController属性,并设置它的mcDelegate为self. DJIInspireMainController是DJIMainController的子类,它是控制飞机的一个mainController, 可以在起飞,降落等情况下获取DJIMCSystemState. 你可以在SDK中查看它的头文件获取更多信息。
进一步的,我们来重构 ViewDidLoad方法,如下所示:
- (void)viewDidLoad {
[super viewDidLoad];
[self initUI];
[self initData];
[self initDrone];
}
-(void)initData
{
self.userLocation = kCLLocationCoordinate2DInvalid;
self.droneLocation = kCLLocationCoordinate2DInvalid;
self.mapController = [[DJIMapController alloc] init];
self.tapGesture = [[UITapGestureRecognizer alloc] initWithTarget:self action:@selector(addWaypoints:)];
[self.mapView addGestureRecognizer:self.tapGesture];
}
接着,实现"DJIAppManagerDelegate"方法:
#pragma mark DJIAppManagerDelegate Method
-(void)appManagerDidRegisterWithError:(int)error
{
NSString* message = @"Register App Successed!";
if (error != RegisterSuccess) {
message = @"Register App Failed! Please enter your App Key and check the network.";
}else
{
[self.inspireDrone connectToDrone];
[self.inspireDrone.mainController startUpdateMCSystemState];
}
UIAlertView* alertView = [[UIAlertView alloc] initWithTitle:@"Register App" message:message delegate:nil cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alertView show];
}
在以上方法中,当app成功注册时,我们可以运行 connectToDrone 方法来连接飞机, 并且运行 startUpdateMCSystemState 方法来更新飞机的系统状态, 这些信息会被用来更新我们飞机的位置及方向. 更进一步,在 viewWillDisappear 方法里, 我们需要中断与飞机的连接,并且销毁drone对象。另外,我们还需要调用inspireDrone的mainController的"stopUpdateMCSystemState"方法,去停止更新DJIMainController的system state, 如下所示:
- (void)viewWillDisappear:(BOOL)animated
{
[super viewWillDisappear:animated];
[self.locationManager stopUpdatingLocation];
[self.inspireDrone.mainController stopUpdateMCSystemState];
[self.inspireDrone disconnectToDrone];
}
在viewDidLoad 方法里, 把 droneLocation 属性的值改为 kCLLocationCoordinate2DInvalid.
self.droneLocation = kCLLocationCoordinate2DInvalid;
同时,更新 focusMapAction 方法来设置 droneLocation 为地图的中心区域,如下所示:
- (IBAction)focusMapAction:(id)sender {
if (CLLocationCoordinate2DIsValid(self.droneLocation)) {
MKCoordinateRegion region = {0};
region.center = self.droneLocation;
region.span.latitudeDelta = 0.001;
region.span.longitudeDelta = 0.001;
[self.mapView setRegion:region animated:YES];
}
}
接下来,我们需要将 MKMapViewDelegate 方法修改成下面的样子. 它会检查 annotation 变量的类并将它的annotationView属性设置为一个 DJIAircraftAnnotationView 类的实例:
- (MKAnnotationView *)mapView:(MKMapView *)mapView viewForAnnotation:(id <MKAnnotation>)annotation
{
if ([annotation isKindOfClass:[MKPointAnnotation class]]) {
MKPinAnnotationView* pinView = [[MKPinAnnotationView alloc] initWithAnnotation:annotation reuseIdentifier:@"Pin_Annotation"];
pinView.pinColor = MKPinAnnotationColorPurple;
return pinView;
}else if ([annotation isKindOfClass:[DJIAircraftAnnotation class]])
{
DJIAircraftAnnotationView* annoView = [[DJIAircraftAnnotationView alloc] initWithAnnotation:annotation reuseIdentifier:@"Aircraft_Annotation"];
((DJIAircraftAnnotation*)annotation).annotationView = annoView;
return annoView;
}
return nil;
}
接着,我们来实现 DJIMainControllerDelegate 方法:
#pragma mark - DJIMainControllerDelegate Method
-(void) mainController:(DJIMainController*)mc didUpdateSystemState:(DJIMCSystemState*)state
{
self.droneLocation = state.droneLocation;
if (!state.isMultipleFlightModeOpen) {
[self.inspireMainController setMultipleFlightModeOpen:YES withResult:nil];
}
self.modeLabel.text = state.flightModeString;
self.gpsLabel.text = [NSString stringWithFormat:@"%d", state.satelliteCount];
self.vsLabel.text = [NSString stringWithFormat:@"%0.1f M/S",state.velocityZ];
self.hsLabel.text = [NSString stringWithFormat:@"%0.1f M/S",(sqrtf(state.velocityX*state.velocityX + state.velocityY*state.velocityY))];
self.altitudeLabel.text = [NSString stringWithFormat:@"%0.1f M",state.altitude];
[self.mapController updateAircraftLocation:self.droneLocation withMapView:self.mapView];
double radianYaw = (state.attitude.yaw * M_PI / 180.0);
[self.mapController updateAircraftHeading:radianYaw];
}
首先,他会更新 droneLocation,将其变为飞机当前的位置. 然后它会打开inspireMainController的multipleFlightMode.
接下来,更新DJIMCSystemState的状态Label的文字. 用DJIMapController里的相关方法来更新飞机的位置以及方向.
最后,实现DJIDroneDelegate 方法,如下所示:
- (void)enterNavigationMode
{
[self.navigationManager enterNavigationModeWithResult:^(DJIError *error) {
if (error.errorCode != ERR_Succeeded) {
NSString* message = [NSString stringWithFormat:@"Enter navigation mode failed:%@", error.errorDescription];
UIAlertView* alertView = [[UIAlertView alloc] initWithTitle:@"Enter Navigation Mode" message:message delegate:self cancelButtonTitle:@"Cancel" otherButtonTitles:@"Retry", nil];
alertView.tag = kEnterNaviModeFailedAlertTag;
[alertView show];
}else
{
NSString* message = @"Enter navigation mode Success";
UIAlertView* alertView = [[UIAlertView alloc] initWithTitle:@"Enter Navigation Mode" message:message delegate:self cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alertView show];
}
}];
}
#pragma mark - DJIDroneDelegate Method
-(void) droneOnConnectionStatusChanged:(DJIConnectionStatus)status
{
if (status == ConnectionSucceeded) {
[self enterNavigationMode];
}
}
如果它成功连接上飞机,运行 DJIInspireMainController的 enterNavigationModeWithResult 方法来检查飞机是否成功进入地面站模式. 如果没有成功,弹出UIAlertView提醒用户. 这里我们实现UIAlertView的delegate方法,如下所示:
#pragma mark - UIAlertViewDelegate
- (void)alertView:(UIAlertView *)alertView clickedButtonAtIndex:(NSInteger)buttonIndex
{
if (alertView.tag == kEnterNaviModeFailedAlertTag) {
if (buttonIndex == 1) {
[self enterNavigationMode];
}
}
}
现在我们测试下这个应用吧! 编译运行工程,将此app安装到你的移动设备上。 然后,用Micro-USB连接线将你的飞机连接上装有Windows系统的PC或者虚拟机, 并且启动飞机和遥控器. 按下Display Simulator按钮. 如果你喜欢,可以在Simulator Config里输入你当前位置的经纬度.
然后运行app,并且将你的移动设备连接到你的遥控器上. 以下是截图画面:
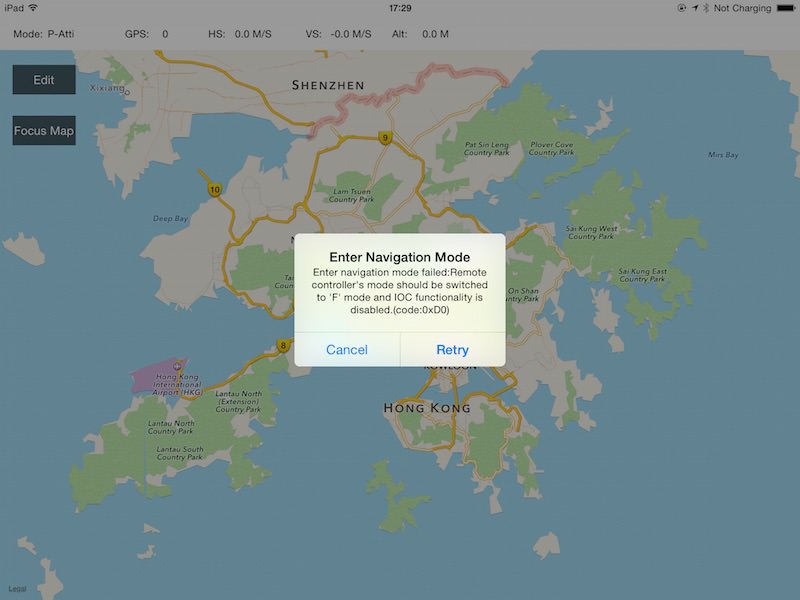
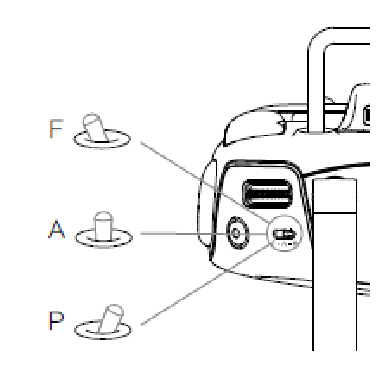
重要事项: 为了解决以上提醒框的问题,将遥控器上的模式到 F 位置上 (在之前的版本中,模式在A位置上) 并且按下 Retry 按钮. 如果当自动巡航开始时模式选择已在F位置,用户需要拨动其他位置再调回 F 位置,然后按下 Retry 按键.
在DJI Mobile SDK里使用地面站,热点环绕,以及JoyStick功能都必须将模式调到 F 位置.
接着,打开PC上的DJI PC 模拟器并按下 Start Simulation 按键. 如果你现在查看app,一架小型红色飞机将会在地图上显示:
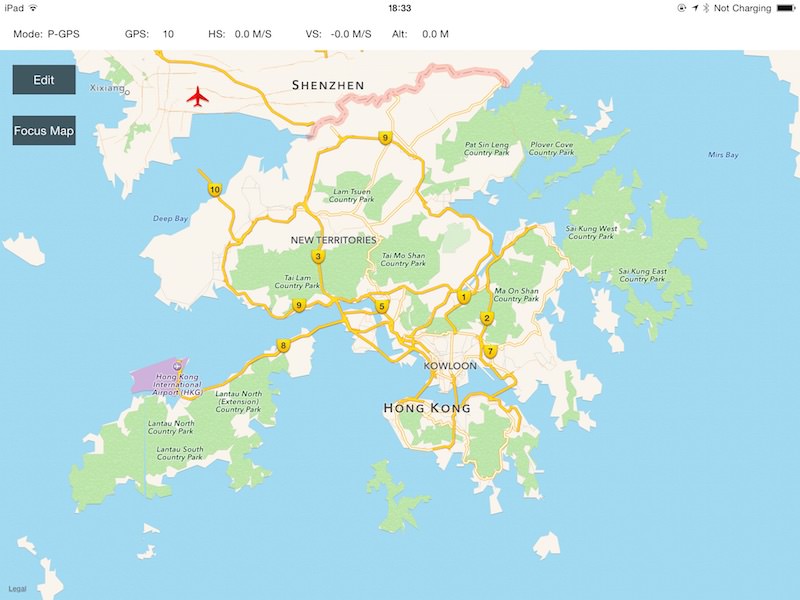
如果你无法找到飞机,按下 "Focus Map" 按钮,然后地图会以飞机为中心放大定位显示,如下动画所示:
现在,如果你在Simulator Config里按下 Stop Simulation ,飞机会从地图上消失,因为模拟器停止向飞机传送GPS模拟信息.
重构UI
如你所见,目前的代码结构比较简单,不够健壮. 为了便于本教程代码工程的继续开发,这里需要重构下代码,而且加入更多的UI元素.
1. 添加并设置新的UIButton
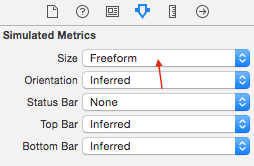
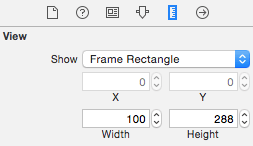
首先,我们新建一个的名为DJIGSButtonController的UIViewController的子类. 确保你在创建文件时勾选上 Also create XIB file. 然后打开 DJIGSButtonController.xib 文件,并在Simulated Metrics部分的Size选项中选择 Freeform .在View部分,调整宽度为 110, 高为 260. 请看下面的效果图:
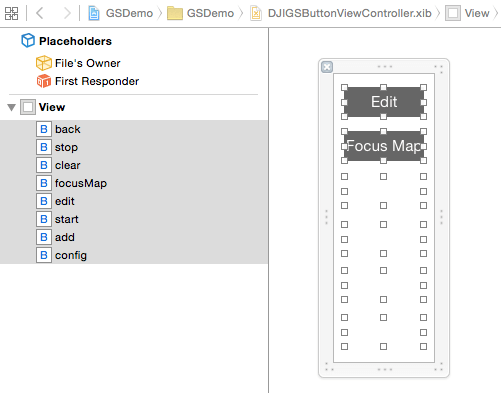
接下来,拖动八个按钮到DJIGSButtonViewController.xib上,并将它们的名字改为 Edit, Back, Clear, Focus Map, Start, Stop, Add 和 Config. Edit覆盖在Back上面, Focus Map覆盖在Add上面. 并且确保 Back, Clear, Start, Add 和 Config 按钮是隐藏状态.
然后在DJIGSButtonViewController.h文件里为八个按钮添加IBOutlets 和 IBActions. 同时,我们将加入一个名为 DJIGSViewMode的枚举值,用来记录app的两种工作模式(View和Edit). 接着,我们添加几个delegate方法,用于响应IBAction的方法调用. 最后,加入一个 - (void)switchToMode:(DJIGSViewMode)mode inGSButtonVC:(DJIGSButtonViewController *)GSBtnVC; 方法,当DJIGSViewMode的值改变时,更新多个按钮的状态. 请看下面的代码:
#import <UIKit/UIKit.h>
typedef NS_ENUM(NSUInteger, DJIGSViewMode) {
DJIGSViewMode_ViewMode,
DJIGSViewMode_EditMode,
};
@class DJIGSButtonViewController;
@protocol DJIGSButtonViewControllerDelegate <NSObject>
- (void)stopBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
- (void)clearBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
- (void)focusMapBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
- (void)startBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
- (void)addBtn:(UIButton *)button withActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
- (void)configBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
- (void)switchToMode:(DJIGSViewMode)mode inGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
@end
@interface DJIGSButtonViewController : UIViewController
@property (weak, nonatomic) IBOutlet UIButton *backBtn;
@property (weak, nonatomic) IBOutlet UIButton *stopBtn;
@property (weak, nonatomic) IBOutlet UIButton *clearBtn;
@property (weak, nonatomic) IBOutlet UIButton *focusMapBtn;
@property (weak, nonatomic) IBOutlet UIButton *editBtn;
@property (weak, nonatomic) IBOutlet UIButton *startBtn;
@property (weak, nonatomic) IBOutlet UIButton *addBtn;
@property (weak, nonatomic) IBOutlet UIButton *configBtn;
@property (assign, nonatomic) DJIGSViewMode mode;
@property (weak, nonatomic) id <DJIGSButtonViewControllerDelegate> delegate;
- (IBAction)backBtnAction:(id)sender;
- (IBAction)stopBtnAction:(id)sender;
- (IBAction)clearBtnAction:(id)sender;
- (IBAction)focusMapBtnAction:(id)sender;
- (IBAction)editBtnAction:(id)sender;
- (IBAction)startBtnAction:(id)sender;
- (IBAction)addBtnAction:(id)sender;
- (IBAction)configBtnAction:(id)sender;
@end
当你完成后,打开 DJIGSButtonViewController.m 文件,替换已有的代码为以下代码:
#import "DJIGSButtonViewController.h"
@implementation DJIGSButtonViewController
- (void)viewDidLoad {
[super viewDidLoad];
[self setMode:DJIGSViewMode_ViewMode];
}
- (void)didReceiveMemoryWarning {
[super didReceiveMemoryWarning];
// Dispose of any resources that can be recreated.
}
#pragma mark - Property Method
- (void)setMode:(DJIGSViewMode)mode
{
_mode = mode;
[_editBtn setHidden:(mode == DJIGSViewMode_EditMode)];
[_focusMapBtn setHidden:(mode == DJIGSViewMode_EditMode)];
[_backBtn setHidden:(mode == DJIGSViewMode_ViewMode)];
[_clearBtn setHidden:(mode == DJIGSViewMode_ViewMode)];
[_startBtn setHidden:(mode == DJIGSViewMode_ViewMode)];
[_stopBtn setHidden:(mode == DJIGSViewMode_ViewMode)];
[_addBtn setHidden:(mode == DJIGSViewMode_ViewMode)];
[_configBtn setHidden:(mode == DJIGSViewMode_ViewMode)];
}
#pragma mark - IBAction Methods
- (IBAction)backBtnAction:(id)sender {
[self setMode:DJIGSViewMode_ViewMode];
if ([_delegate respondsToSelector:@selector(switchToMode:inGSButtonVC:)]) {
[_delegate switchToMode:self.mode inGSButtonVC:self];
}
}
- (IBAction)stopBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(stopBtnActionInGSButtonVC:)]) {
[_delegate stopBtnActionInGSButtonVC:self];
}
}
- (IBAction)clearBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(clearBtnActionInGSButtonVC:)]) {
[_delegate clearBtnActionInGSButtonVC:self];
}
}
- (IBAction)focusMapBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(focusMapBtnActionInGSButtonVC:)]) {
[_delegate focusMapBtnActionInGSButtonVC:self];
}
}
- (IBAction)editBtnAction:(id)sender {
[self setMode:DJIGSViewMode_EditMode];
if ([_delegate respondsToSelector:@selector(switchToMode:inGSButtonVC:)]) {
[_delegate switchToMode:self.mode inGSButtonVC:self];
}
}
- (IBAction)startBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(startBtnActionInGSButtonVC:)]) {
[_delegate startBtnActionInGSButtonVC:self];
}
}
- (IBAction)addBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(addBtn:withActionInGSButtonVC:)]) {
[_delegate addBtn:self.addBtn withActionInGSButtonVC:self];
}
}
- (IBAction)configBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(configBtnActionInGSButtonVC:)]) {
[_delegate configBtnActionInGSButtonVC:self];
}
}
@end
这些改变使得代码架构变得更加简洁与健壮,这将会方便以后的维护.
现在,我们回到 DJIRootViewController.h 文件并删除 editButton IBOutlet, resetPointsAction 方法, 以及 focusMapAction 方法. 删除这些以后,创建一个名为 "topBarView" 的UIView IBOutlet并将其连接到 Main.storyboard的 RootViewController的对应View上, 如下所示:
然后打开 DJIRootViewController.m 文件, 导入DJIGSButtonViewController.h头文件. 接着创建一个DJIGSButtonViewController类型的属性并命名为 gsButtonVC,然后在类里实现 DJIGSButtonViewController的 DJIGSButtonViewControllerDelegate 协议:
#import "DJIRootViewController.h"
#import "DJIGSButtonViewController.h"
#define kEnterNaviModeFailedAlertTag 1001
@interface DJIRootViewController ()<DJIGSButtonViewControllerDelegate>
@property (nonatomic, assign)BOOL isEditingPoints;
@property (nonatomic, strong)DJIGSButtonViewController *gsButtonVC;
@end
下一步,初始化initUI方法里的 gsButtonVC 属性并将原来的 focusMapAction 方法中的代码移到一个名为 focusMap的新方法里, 如下所示:
self.gsButtonVC = [[DJIGSButtonViewController alloc] initWithNibName:@"DJIGSButtonViewController" bundle:[NSBundle mainBundle]];
[self.gsButtonVC.view setFrame:CGRectMake(0, self.topBarView.frame.origin.y + self.topBarView.frame.size.height, self.gsButtonVC.view.frame.size.width, self.gsButtonVC.view.frame.size.height)];
self.gsButtonVC.delegate = self;
[self.view addSubview:self.gsButtonVC.view];
- (void)focusMap
{
if (CLLocationCoordinate2DIsValid(self.droneLocation)) {
MKCoordinateRegion region = {0};
region.center = self.droneLocation;
region.span.latitudeDelta = 0.001;
region.span.longitudeDelta = 0.001;
[self.mapView setRegion:region animated:YES];
}
}
最后,实现 DJIGSButtonViewController的 delegate 方法, 如下所示:
#pragma mark - DJIGSButtonViewController Delegate Methods
- (void)stopBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
}
- (void)clearBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
[self.mapController cleanAllPointsWithMapView:self.mapView];
}
- (void)focusMapBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
[self focusMap];
}
- (void)configBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
}
- (void)startBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
}
- (void)switchToMode:(DJIGSViewMode)mode inGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
if (mode == DJIGSViewMode_EditMode) {
[self focusMap];
}
}
- (void)addBtn:(UIButton *)button withActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
if (self.isEditingPoints) {
self.isEditingPoints = NO;
[button setTitle:@"Add" forState:UIControlStateNormal];
}else
{
self.isEditingPoints = YES;
[button setTitle:@"Finished" forState:UIControlStateNormal];
}
}
在 - (void)switchToMode:(DJIGSViewMode)mode inGSButtonVC:(DJIGSButtonViewController *)GSBtnVC delegate方法里, 我们调用 focusMap 方法. 进行这样的操作,我们可以实现在按下edit按钮时,将地图定位到飞机的位置,省去用户每次都需要放大地图才能编辑的麻烦,提升用户体验. 同时,当应用在edit模式下, isEditingPoints属性的值会被设置为 YES.
现在,我们编译并运行该工程,并尝试按下Edit 和 Back 按钮. 以下是当你按下按钮时的动画:
设置智能飞行任务
1. DJIWaypoint
我们先看下 DJIWaypoint.h 文件. 比如说,你可以使用:
-(id) initWithCoordinate:(CLLocationCoordinate2D)coordinate;
来创建一个有特定坐标的waypoint对象. 当你创建了waypoint后,可以通过调用以下代码,向其添加一个DJIWaypointAction:
-(BOOL) addWaypointAction:(DJIWaypointAction*)action;
更进一步的,有了waypoints,你可以设置坐标,高度,朝向甚至更多参数. 要了解更多细节,请查看DJIWaypoint.h 头文件.
2. DJIWaypointMission
当你想要上传,开始和停止一个GroundStation Waypoint 任务(Task)时,你需要使用DJIWaypointMission. 你可以使用下面的方法来添加 DJIWaypoint 类型的waypoint:
-(void) addWaypoint:(DJIWaypoint*)waypoint;
相反地, 你也可以调用以下方法来删除任务中的waypoint:
-(void) removeWaypoint:(DJIWaypoint*)waypoint;
更多的, 你可以设置类型为DJIWaypointMissionFinishedAction枚举值的finishedAction属性,来设置飞机完成任务后要进行的动作. 最后,你可以设置类型为DJIWaypointMissionHeadingMode枚举值的 headingMode 属性来设置飞机执行任务时的机头朝向. 下面是一部分头文件内容:
typedef NS_ENUM(uint8_t, DJIWaypointMissionFinishedAction)
{
/**
* No action will be taken. The aircraft will exit the task and hover in the
* air where the task was completed. After that, the aircraft will be able
* to be controlled by the remote controller.
*/
DJIWaypointMissionFinishedNoAction,
/**
* The aicraft will go home.
*/
DJIWaypointMissionFinishedGoHome,
/**
* The aircraft will land automatically.
*/
DJIWaypointMissionFinishedAutoLand,
/**
* The aircraft will go back to its first waypoint.
*/
DJIWaypointMissionFinishedGoFirstWaypoint,
/**
* If the user attempts to pull the aircraft back along the flight path as the
* mission is being executed, the aircarft will move towards the previous waypoint
* and will continue to do so until there are no more waypoint to move back to or
* the user has stopped attempting to move the aircraft back. In the process of moving the
* aircraft back, if the user ever stops attempting to do so the aircraft will,
* automatically continue the mission until the end.
*
* If the aircraft had been pulled back along the flight path all the way to the
* first waypoint, and the user continued to pull the back, the aircarft would continue
* to hover at the first waypoint. Now, if the user stopped attempting to pull the aircraft
* back, the aicraft would execute the mission from start to finish, as it would've if you
* had just started the waypoint mission for the first time.
*/
DJIWaypointMissionFinishedContinueUntilEnd
};
/**
* Current waypoint mission heading mode.
*/
typedef NS_ENUM(NSUInteger, DJIWaypointMissionHeadingMode){
/**
* Aircraft's heading alway be the tangent to the direction of the path to each
* of the waypoints in the waypoint mission. For example, when the aircarft is
* moving past a waypoint along a curved path, the heading of the aicraft will be
* tangent to the curve.
*/
DJIWaypointMissionHeadingAuto,
/**
* Aircraft's heading will be set to the initial direction the aircraft
* took off from.
*/
DJIWaypointMissionHeadingUsingInitialDirection,
/**
* Aircraft's heading will be controlled by the remote controller.
*/
DJIWaypointMissionHeadingControlByRemoteController,
/**
* Aircraft's heading will be set based on each individual waypoint's heading value
*/
DJIWaypointMissionHeadingUsingWaypointHeading,
};
/**
* Action the aircraft will take when the waypoint mission is complete.
*/
@property(nonatomic, assign) DJIWaypointMissionFinishedAction finishedAction;
/**
* Heading mode the aircraft will adhere to during the waypoint mission.
*/
@property(nonatomic, assign) DJIWaypointMissionHeadingMode headingMode;
/**
* Add a waypoint to the waypoint mission. The maximum number of waypoints should not larger then DJIWaypointMissionMaximumWaypointCount. and DJIWaypointMissionMinimumWaypointCount at least.
*
* @param Waypoint to be added to the waypoint mission.
*/
-(void) addWaypoint:(DJIWaypoint*)waypoint;
/**
* Removes the waypoint passed in as a parameter from the waypoint mission.
*
* @param waypoint Waypoint object to be removed.
*/
-(void) removeWaypoint:(DJIWaypoint*)waypoint;
更多细节,请在DJI Mobile SDK中查看 DJIWaypointMission.h 头文件.
3. 创建 DJIWaypointConfigViewController
在此demo中,我们假设所有加入地图中的waypoint的参数设置都是一样的.
现在,我们创建一个新的ViewController来让用户设置waypoint的参数. 来到Xcode的project navigator,右键点击 GSDemo 文件夹, 选择 New File..., 将它的子类设置为 UIViewController, 命名其为 "DJIWaypointConfigViewController", 然后确保 "Also create XIB file" 为已选状态. 接着,打开 DJIWaypointConfigViewController.xib 文件并实现UI, 如下所示:
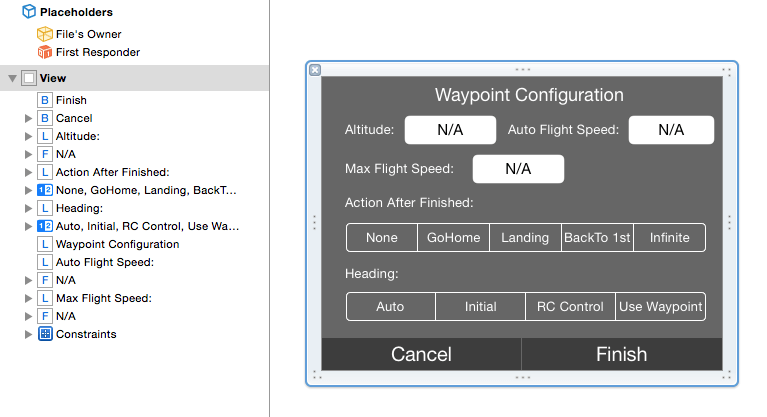
在Waypoint Configuration ViewController里, 我们使用UITextField来让用户设置DJIWaypoint实例的altitude属性. 然后,用两个UITextField来让用户设置DJIWaypointMission的maxFlightSpeed 和 autoFlightSpeed属性. 接下来,有两个UISegmentedControl控件来设置DJIWaypointMission对象的 finishedAction 和 headingMode 属性.
在最下面,我们加入了两个UIButton响应 Cancel 和 Finish 方法. 更多设置的细节,比如视图Frame的位置,Frame的大小,以及每个UI元素的背景颜色,请查看本教程源代码里的 DJIWaypointConfigViewController.xib 文件.
现在,我们为DJIWaypointConfigViewController.h文件里的每一个UI元素创建对应的IBOutlets 和 IBActions, 如下所示:
#import <UIKit/UIKit.h>
@class DJIWaypointConfigViewController;
@protocol DJIWaypointConfigViewControllerDelegate <NSObject>
- (void)cancelBtnActionInDJIWaypointConfigViewController:(DJIWaypointConfigViewController *)waypointConfigVC;
- (void)finishBtnActionInDJIWaypointConfigViewController:(DJIWaypointConfigViewController *)waypointConfigVC;
@end
@interface DJIWaypointConfigViewController : UIViewController
@property (weak, nonatomic) IBOutlet UITextField *altitudeTextField;
@property (weak, nonatomic) IBOutlet UITextField *autoFlightSpeedTextField;
@property (weak, nonatomic) IBOutlet UITextField *maxFlightSpeedTextField;
@property (weak, nonatomic) IBOutlet UISegmentedControl *actionSegmentedControl;
@property (weak, nonatomic) IBOutlet UISegmentedControl *headingSegmentedControl;
@property (weak, nonatomic) id <DJIWaypointConfigViewControllerDelegate>delegate;
- (IBAction)cancelBtnAction:(id)sender;
- (IBAction)finishBtnAction:(id)sender;
@end
这里,我们还创建了两个 DJIWaypointConfigViewControllerDelegate delegate 方法,用来响应 Cancel 和 Finish 两个按钮被按下的事件.
接着,我们用以下代码替换掉DJIWaypointConfigViewController.m 文件里的代码:
#import "DJIWaypointConfigViewController.h"
@interface DJIWaypointConfigViewController ()
@end
@implementation DJIWaypointConfigViewController
- (void)viewDidLoad {
[super viewDidLoad];
[self initUI];
}
- (void)didReceiveMemoryWarning {
[super didReceiveMemoryWarning];
// Dispose of any resources that can be recreated.
}
- (void)initUI
{
self.altitudeTextField.text = @"50"; //Set the altitude to 50
self.autoFlightSpeedTextField.text = @"8"; //Set the autoFlightSpeed to 8
self.maxFlightSpeedTextField.text = @"10"; //Set the maxFlightSpeed to 10
[self.actionSegmentedControl setSelectedSegmentIndex:1]; //Set the finishAction to DJIWaypointMissionFinishedGoHome
[self.headingSegmentedControl setSelectedSegmentIndex:0]; //Set the headingMode to DJIWaypointMissionHeadingAuto
}
- (IBAction)cancelBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(cancelBtnActionInDJIWaypointConfigViewController:)]) {
[_delegate cancelBtnActionInDJIWaypointConfigViewController:self];
}
}
- (IBAction)finishBtnAction:(id)sender {
if ([_delegate respondsToSelector:@selector(finishBtnActionInDJIWaypointConfigViewController:)]) {
[_delegate finishBtnActionInDJIWaypointConfigViewController:self];
}
}
@end
在以上代码中, 我们创建了一个用来初始化UI控件的 initUI 方法, 它会在viewDidload方法里被调用. 比如说,我们将 altitudeTextField 的默认文本设置为 50, 这样用户就不需要在第一次打开程序时输入自定义的高度数值. 他们可以马上按下 Finish 键,而不需要在开始前做设定操作。
设置地面站任务
1. 添加 DJIWaypointConfigViewController 到 DJIRootViewController中
现在,我们来到 DJIRootViewController.m 文件中, 在顶部添加 DJIWaypointConfigViewController.h 头文件, 然后创建一个类型为DJIWaypointConfigViewController的属性,将它命名为“waypointConfigVC”. 然后,实现 DJIWaypointConfigViewControllerDelegate 协议, 如下所示:
#import "DJIRootViewController.h"
#import "DJIGSButtonViewController.h"
#import "DJIWaypointConfigViewController.h"
#define kEnterNaviModeFailedAlertTag 1001
@interface DJIRootViewController ()<DJIGSButtonViewControllerDelegate, DJIWaypointConfigViewControllerDelegate>
@property (nonatomic, assign)BOOL isEditingPoints;
@property (nonatomic, strong)DJIGSButtonViewController *gsButtonVC;
@property (nonatomic, strong)DJIWaypointConfigViewController *waypointConfigVC;
@end
接下来,我们加入一些代码来初始化waypointConfigVC实例变量并在 initUI 方法的底部将它的delegate设置为DJIRootViewController:
-(void) initUI
{
self.modeLabel.text = @"N/A";
self.gpsLabel.text = @"0";
self.vsLabel.text = @"0.0 M/S";
self.hsLabel.text = @"0.0 M/S";
self.altitudeLabel.text = @"0 M";
self.gsButtonVC = [[DJIGSButtonViewController alloc] initWithNibName:@"DJIGSButtonViewController" bundle:[NSBundle mainBundle]];
[self.gsButtonVC.view setFrame:CGRectMake(0, self.topBarView.frame.origin.y + self.topBarView.frame.size.height, self.gsButtonVC.view.frame.size.width, self.gsButtonVC.view.frame.size.height)];
self.gsButtonVC.delegate = self;
[self.view addSubview:self.gsButtonVC.view];
self.waypointConfigVC = [[DJIWaypointConfigViewController alloc] initWithNibName:@"DJIWaypointConfigViewController" bundle:[NSBundle mainBundle]];
self.waypointConfigVC.view.alpha = 0;
self.waypointConfigVC.view.autoresizingMask = UIViewAutoresizingFlexibleLeftMargin|UIViewAutoresizingFlexibleRightMargin|UIViewAutoresizingFlexibleTopMargin|UIViewAutoresizingFlexibleBottomMargin;
CGFloat configVCOriginX = (CGRectGetWidth(self.view.frame) - CGRectGetWidth(self.waypointConfigVC.view.frame))/2;
CGFloat configVCOriginY = CGRectGetHeight(self.topBarView.frame) + CGRectGetMinY(self.topBarView.frame) + 8;
[self.waypointConfigVC.view setFrame:CGRectMake(configVCOriginX, configVCOriginY, CGRectGetWidth(self.waypointConfigVC.view.frame), CGRectGetHeight(self.waypointConfigVC.view.frame))];
if ([UIDevice currentDevice].userInterfaceIdiom == UIUserInterfaceIdiomPad) //Check if it's using iPad and center the config view
{
self.waypointConfigVC.view.center = self.view.center;
}
self.waypointConfigVC.delegate = self;
[self.view addSubview:self.waypointConfigVC.view];
}
在以上代码中,我们将waypointConfigVC的view的 alpha 属性设置为零,来隐藏该view. 接下来,当在iPad上运行app时,将它的位置设置为 DJIRootViewController的view的中心.
更进一步的,实现 DJIWaypointConfigViewControllerDelegate 的两个方法, 如下所示:
#pragma mark - DJIWaypointConfigViewControllerDelegate Methods
- (void)cancelBtnActionInDJIWaypointConfigViewController:(DJIWaypointConfigViewController *)waypointConfigVC
{
__weak DJIRootViewController *weakSelf = self;
[UIView animateWithDuration:0.25 animations:^{
weakSelf.waypointConfigVC.view.alpha = 0;
}];
}
- (void)finishBtnActionInDJIWaypointConfigViewController:(DJIWaypointConfigViewController *)waypointConfigVC
{
__weak DJIRootViewController *weakSelf = self;
[UIView animateWithDuration:0.25 animations:^{
weakSelf.waypointConfigVC.view.alpha = 0;
}];
}
在第一个delegate方法中, 我们用一个UIView的类方法,来动态改变waypointConfigVC的view的alpha数值:
+ (void)animateWithDuration:(NSTimeInterval)duration animations:(void (^)(void))animations NS_AVAILABLE_IOS(4_0);
在第二个 delegate 方法中, 我们做同样的事情.
最后,将
- (void)configBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC;
方法里的代码替换为以下代码,实现在用户按下start 按钮时显示waypointConfigVC的view的功能:
- (void)configBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
__weak DJIRootViewController *weakSelf = self;
[UIView animateWithDuration:0.25 animations:^{
weakSelf.waypointConfigVC.view.alpha = 1.0;
}];
}
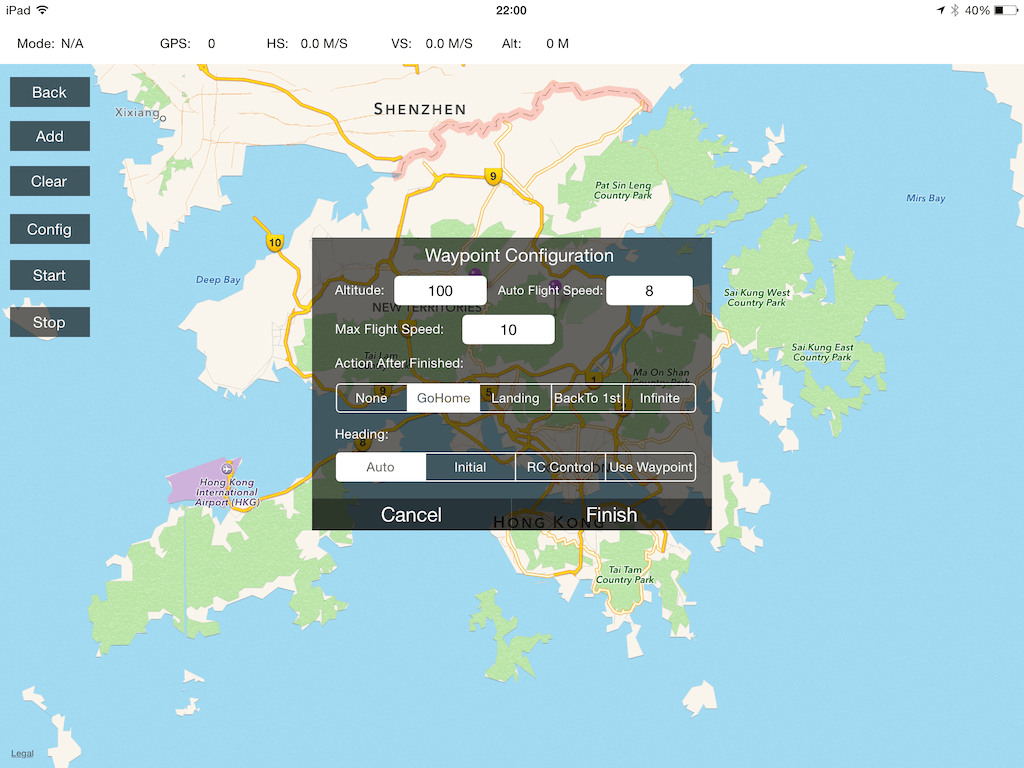
当这些都完成后,我们来编译运行下工程. 尝试按下Edit 按钮和 Start 按钮来显示waypointConfigVC的view:
2. 操作地面站任务
现在,我们回到 DJIRootViewController.h 文件. 首先,在interface里实现 GroundStationDelegate 和 DJINavigationDelegate 协议. 然后,创造一个NSObject
#import <UIKit/UIKit.h>
#import <DJISDK/DJISDK.h>
#import "DJIMapController.h"
#import <MapKit/MapKit.h>
#import <CoreLocation/CoreLocation.h>
@interface DJIRootViewController : UIViewController<MKMapViewDelegate, CLLocationManagerDelegate, DJIDroneDelegate, DJIMainControllerDelegate, GroundStationDelegate, DJINavigationDelegate, DJIAppManagerDelegate>
@property (nonatomic, strong) DJIMapController *mapController;
@property (weak, nonatomic) IBOutlet MKMapView *mapView;
@property(nonatomic, strong) CLLocationManager* locationManager;
@property(nonatomic, assign) CLLocationCoordinate2D userLocation;
@property(nonatomic, assign) CLLocationCoordinate2D droneLocation;
@property (nonatomic, strong) UITapGestureRecognizer *tapGesture;
@property (weak, nonatomic) IBOutlet UIView *topBarView;
@property(nonatomic, strong) IBOutlet UILabel* modeLabel;
@property(nonatomic, strong) IBOutlet UILabel* gpsLabel;
@property(nonatomic, strong) IBOutlet UILabel* hsLabel;
@property(nonatomic, strong) IBOutlet UILabel* vsLabel;
@property(nonatomic, strong) IBOutlet UILabel* altitudeLabel;
@property(nonatomic, strong) DJIDrone* inspireDrone;
@property(nonatomic, strong) DJIInspireMainController* inspireMainController;
@property(nonatomic, weak) NSObject<DJINavigation>* navigationManager;
@property(nonatomic, weak) NSObject<DJIWaypointMission>* waypointMission;
@property(nonatomic, strong) UIAlertView* uploadProgressView;
@end
接下来,来到 DJIRootViewController.m 文件并设置 waypointMission 实例变量的值为"self.navigationManager.waypointMission", 如下所示:
- (void)initDrone
{
self.inspireDrone = [[DJIDrone alloc] initWithType:DJIDrone_Inspire];
self.inspireDrone.delegate = self;
self.navigationManager = self.inspireDrone.mainController.navigationManager;
self.navigationManager.delegate = self;
self.inspireMainController = (DJIInspireMainController*)self.inspireDrone.mainController;
self.inspireMainController.mcDelegate = self;
self.waypointMission = self.navigationManager.waypointMission;
[self registerApp];
}
更进一步地,在configBtnActionInGSButtonVC delegate方法下方加入以下代码:
- (void)configBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
__weak DJIRootViewController *weakSelf = self;
NSArray* wayPoints = self.mapController.wayPoints;
if (wayPoints == nil || wayPoints.count < DJIWaypointMissionMinimumWaypointCount) {
UIAlertView *alert = [[UIAlertView alloc] initWithTitle:@"No or not enough waypoint for mission" message:@"" delegate:self cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alert show];
return;
}
[UIView animateWithDuration:0.25 animations:^{
weakSelf.waypointConfigVC.view.alpha = 1.0;
}];
[self.waypointMission removeAllWaypoints];
for (int i = 0; i < wayPoints.count; i++) {
CLLocation* location = [wayPoints objectAtIndex:i];
if (CLLocationCoordinate2DIsValid(location.coordinate)) {
DJIWaypoint* waypoint = [[DJIWaypoint alloc] initWithCoordinate:location.coordinate];
[self.waypointMission addWaypoint:waypoint];
}
}
}
以上新加入的代码中, 我们创建了一个局部 NSArray 变量,并命名它为 “wayPoints”, 并将它的数值设置为 mapController 的 wayPoints 数组. 接下来,查看数组是否存在或者数组是否为空. 如果它为空或者不存在, 显示UIAlertView告知用户知道此任务里没有航点.
重要事项: 为了安全,在任务开始前加入逻辑来查看GPS卫星的数量非常重要,此操作已在本教程的第一部分中提到过. 如果卫星数量小于6,你应该阻止用户开始地面站任务并且显示警告信息. 因为这里我们用 DJI PC 模拟器, 我们在一个完美的条件下测试应用,GPS卫星数量会一直是10.
下一步,我们用一个for循环来获取wayPoints数组的每一个waypoint对象,并且用以下方法检查它的 coordinate参数是否有效:
BOOL CLLocationCoordinate2DIsValid(CLLocationCoordinate2D coord);
最后,如果coordinate(坐标)有效,我们会创建一个DJIWaypoint类型的waypoint,并用以下方法将其加入到waypointMission中:
-(void) addWaypoint:(DJIWaypoint*)waypoint;
当你完成以上任务时, 我们来到 DJIWaypointConfigViewController 的delegate方法 finishBtnActionInDJIWaypointConfigViewController,并将它的内容替换为以下代码:
- (void)finishBtnActionInDJIWaypointConfigViewController:(DJIWaypointConfigViewController *)waypointConfigVC
{
__weak DJIRootViewController *weakSelf = self;
[UIView animateWithDuration:0.25 animations:^{
weakSelf.waypointConfigVC.view.alpha = 0;
}];
for (int i = 0; i < self.waypointMission.waypointCount; i++) {
DJIWaypoint* waypoint = [self.waypointMission waypointAtIndex:i];
waypoint.altitude = [self.waypointConfigVC.altitudeTextField.text floatValue];
}
self.waypointMission.maxFlightSpeed = [self.waypointConfigVC.maxFlightSpeedTextField.text floatValue];
self.waypointMission.autoFlightSpeed = [self.waypointConfigVC.autoFlightSpeedTextField.text floatValue];
self.waypointMission.headingMode = (DJIWaypointMissionHeadingMode)self.waypointConfigVC.headingSegmentedControl.selectedSegmentIndex;
self.waypointMission.finishedAction = (DJIWaypointMissionFinishedAction)self.waypointConfigVC.actionSegmentedControl.selectedSegmentIndex;
if (self.waypointMission.isValid) {
if (weakSelf.uploadProgressView == nil) {
weakSelf.uploadProgressView = [[UIAlertView alloc] initWithTitle:@"" message:@"" delegate:nil cancelButtonTitle:nil otherButtonTitles:nil];
[weakSelf.uploadProgressView show];
}
[self.waypointMission setUploadProgressHandler:^(uint8_t progress) {
[weakSelf.uploadProgressView setTitle:@"Mission Uploading"];
NSString* message = [NSString stringWithFormat:@"%d%%", progress];
[weakSelf.uploadProgressView setMessage:message];
}];
[self.waypointMission uploadMissionWithResult:^(DJIError *error) {
[weakSelf.uploadProgressView setTitle:@"Mission Upload Finished"];
if (error.errorCode != ERR_Succeeded) {
[weakSelf.uploadProgressView setMessage:@"Mission Invalid!"];
}
[weakSelf.waypointMission setUploadProgressHandler:nil];
[weakSelf performSelector:@selector(hideProgressView) withObject:nil afterDelay:3.0];
[weakSelf.waypointMission startMissionWithResult:^(DJIError *error) {
if (error.errorCode != ERR_Succeeded) {
UIAlertView* alertView = [[UIAlertView alloc] initWithTitle:@"Start Mission Failed" message:error.errorDescription delegate:nil cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alertView show];
}
}];
}];
}else
{
UIAlertView *invalidMissionAlert = [[UIAlertView alloc] initWithTitle:@"Waypoint mission invalid" message:@"" delegate:self cancelButtonTitle:@"OK" otherButtonTitles: nil];
[invalidMissionAlert show];
}
}
以上代码中,我们根据DJIWaypointConfigViewController中的设置, 用for循环来设置waypointMission航点数组的DJIWaypoint的 altitude. 当你完成这件事后,我们更新waypointMission的 maxFlightSpeed, autoFlightSpeed, headingMode 和 finishedAction 属性. 接着,我们检查waypointMission是否有效,当它无效时,添加一个UIAlertView来提示用户。接着,创建并展示uploadProgressView对象,去显示上传waypoint任务的状态信息。接着,实现waypointMission的setUploadProgressHandler block来更新waypoint 任务上传进度值。最后,我们调用waypointMission的uploadMissionWithResult方法来上传地面站任务。在result block里面,我们可以更新uploadProgressView的内容,并且隐藏它。完成之后,我们调用waypointMission的startMissionWithResult方法以开始地面站任务。
更进一步的,我们创建了一个命名为hideProgressView的新方法,用来隐藏 uploadProgressView, 然后在GroundStationDelegate方法中调用,去更新任务的状态, 如下所示:
-(void) hideProgressView
{
if (self.uploadProgressView) {
[self.uploadProgressView dismissWithClickedButtonIndex:-1 animated:YES];
self.uploadProgressView = nil;
}
}
#pragma mark - GroundStationDelegate
-(void) groundStation:(id<DJIGroundStation>)gs didExecuteWithResult:(GroundStationExecuteResult*)result
{
if (result.currentAction == GSActionStart) {
if (result.executeStatus == GSExecStatusFailed) {
[self hideProgressView];
NSLog(@"Mission Start Failed...");
}
}
if (result.currentAction == GSActionUploadTask) {
if (result.executeStatus == GSExecStatusFailed) {
[self hideProgressView];
NSLog(@"Upload Mission Failed");
}
}
}
-(void) groundStation:(id<DJIGroundStation>)gs didUploadWaypointMissionWithProgress:(uint8_t)progress
{
if (self.uploadProgressView == nil) {
self.uploadProgressView = [[UIAlertView alloc] initWithTitle:@"Mission Uploading" message:@"" delegate:nil cancelButtonTitle:nil otherButtonTitles:nil];
[self.uploadProgressView show];
}
NSString* message = [NSString stringWithFormat:@"%d%%", progress];
[self.uploadProgressView setMessage:message];
}
在上面的代码中,第一个delegate方法是用来获取地面站任务执行的结果. 在我们检查GroundStationExecuteResult里的 currentAction 和 executeStatus 属性的值后,调用 hideProgressView 方法来隐藏 uploadProgressView .
第二个delegate方法用来检查上传waypoint任务的进度. 这里,我们初始化 uploadProgressView 实例变量并将它的message 属性设置为delegate方法的 progress 变量. 要了解更多细节,请查看 DJIGroundStation.h 文件.
最后,我们来实现startBtnActionInGSButtonVC,如下所示:
- (void)startBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
[self.waypointMission startMissionWithResult:^(DJIError *error) {
if (error.errorCode != ERR_Succeeded) {
UIAlertView* alertView = [[UIAlertView alloc] initWithTitle:@"Start Mission Failed" message:error.errorDescription delegate:nil cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alertView show];
}
}];
}
这里,我们调用了waypointMission的startMissionWithResult方法来开始地面站航点任务!接着创建一个UIAlertView,在任务开始失败时提醒用户。
最后,我们来实现DJIGSButtonViewController的delegate方法stopBtnActionInGSButtonVC,用来停止地面站任务,如下所示:
- (void)stopBtnActionInGSButtonVC:(DJIGSButtonViewController *)GSBtnVC
{
[self.waypointMission stopMissionWithResult:^(DJIError *error) {
if (error.errorCode == ERR_Succeeded) {
UIAlertView* alertView = [[UIAlertView alloc] initWithTitle:@"Stop Mission Success" message:@"" delegate:nil cancelButtonTitle:@"OK" otherButtonTitles:nil];
[alertView show];
}
}];
}
Demo演示
你已经在本教程中做了很多操作, 现在是时候测试你的app了.
重要事项: 请确保你飞机的电池量高于10%, 否则地面站任务将会失败!
编译并运行此工程,安装应用到你的移动设备上. 之后,请用Micro USB线将你的飞机连接上运行着Windows系统的PC或者虚拟机. 然后,启动遥控器和飞机. 接下来,在DJI PC 模拟器中按下 Display Simulator 按钮,你可以按需要输入你当前位置的经纬度信息到模拟器中.
然后使用苹果数据线,将你的移动设备连接上遥控器,并且运行app. 你将会看到下面的截图:
如果你遇到这个问题,请在此教程的前半部分查看解决方案. 接下来,我们回到DJI PC 模拟器,按下 Start Simulation 按钮. 一架小型红色飞机会出现在地图上,如下图所示:
按下 "Edit" 按钮, 地图会自动放大并且定位到当前飞机的坐标位置:
接下来,点击地图上任何位置,测试下添加航点的功能. 在每一个你点击地图的地方,都会出现一个紫色的图钉,代表你设置的航点位置, 如下动画所示:
你一旦按下 Start 按钮, Waypoint Configuration view就会出现. 当你做完适当的设置操作后,按下 Finish 按钮. 航点任务会开始上传并且在上传结束时,任务会被处理. 这时你会看到飞机开始朝你之前设置好的航点位置移动, 如下动画所示:
与此同时,你也可以在DJI PC 模拟器上目睹Inspire 1 起飞和飞行的全过程.
当航点任务结束时,Inspire 1会开始返航!
遥控器会开始发出滴滴声,同时遥控器上的 Go Home 键会开始闪烁白灯. 现在我们来看下DJI PC 模拟器的情景:
Inspire 1最后会回到Home点,着陆,并且遥控器的滴滴声会停止. 然后app会回到普通状态. 如果你按下 Clear 按钮,之前设置的全部航点都会消失. 在任务过程中。如果你想要停止地面站任务,你可以按下 Stop 按钮.
总结
在此教程中,你已经学会了如何设置并使用DJI PC Simulator来测试你的地面站应用,如何将你的飞机的固件升级为开发者版本,如何使用DJI Mobile SDK来创建简单的地图,如何修改地图的annotation,以及如何在地图上使用DJI PC Simulator传送过来的的GPS模拟信息来更新飞机的位置等. 同时,你还学会了如何设置 DJIWaypointMission 和 DJIWaypointMission, 如何使用 DJIWaypointMission 来添加waypoint. 你可以用DJIInspireMainController(我们在使用 Inspire 1)中的方法来 upload , start 和 stop 地面站任务. 最后,你学习了如何使用 DJINavigationDelegate 和 GroundStationDelegate 方法来获取地面站任务的信息.
恭喜! 你已经完成了本教程的demo工程,你可以在现有基础上创建你自己的地面站应用. 你可以改善加入航点的方法(比如说在地图上画线自动生成航点), 单独设置航点的属性 (比如说机头朝向等), 以及加入更多功能. 想要开发出一个好玩的地面站应用,你还有很长的路要走. 祝你好运,也希望你能喜欢我们的教程!